Given the parameters p_1,p_2,p_3 does the following system can be solved: This system actually discribes a Rotation Matrix p_1 a bc p_2 de f p_3 where only p_1, p_2 and _p3 are know. For example p_1=p_2=p_3=1 would result in a=b=c=d=e=f=0. Why is this unabigiously) solvable / not solvable? If it is solvable, what is the solution?
Alfredeim
Answered question
2022-09-15
This system actually discribes a Rotation Matrix
where only , and are know. For example would result in .
Why is this system (unabigiously) solvable / not solvable?
If it is solvable, what is the solution?
Answer & Explanation
Dalton Erickson
Beginner2022-09-16Added 10 answers
If is a rotation matrix, then This implies that and have the same entries on the main diagonal. But if is not the identity, so the rotation matrix is not completely determined by the entries on its main diagonal.
On the other hand, if is a unit vector on the axis of rotation of and if 𝜃 is the angle of rotation about that axis, then
for Moreover,
Therefore we can express cos𝜃 in terms of , , and . Plug that value of cos𝜃 into equation (1) for each this either gives or gives two possible values of which differ only by a sign change.
We can safely assume that , because the rotation described by angle and unit vector is the same as the rotation described by angle and unit vector . That means that in general there are eight possible ways to fill in the matrix (one for each choice of the signs of each of the ), therefore eight possible solutions to the given set of equations. (For , there are four solutions if exactly one of the is zero, two solutions if two of the 𝑢𝑖 are equal to zero. There are half as many solutions if , and of course only one solution if .) Moreover, by computing the rotation matrix for the rotation by angle around the axis given by , we can compute all the unknown entries and in the rotation matrix for a specific choice of
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??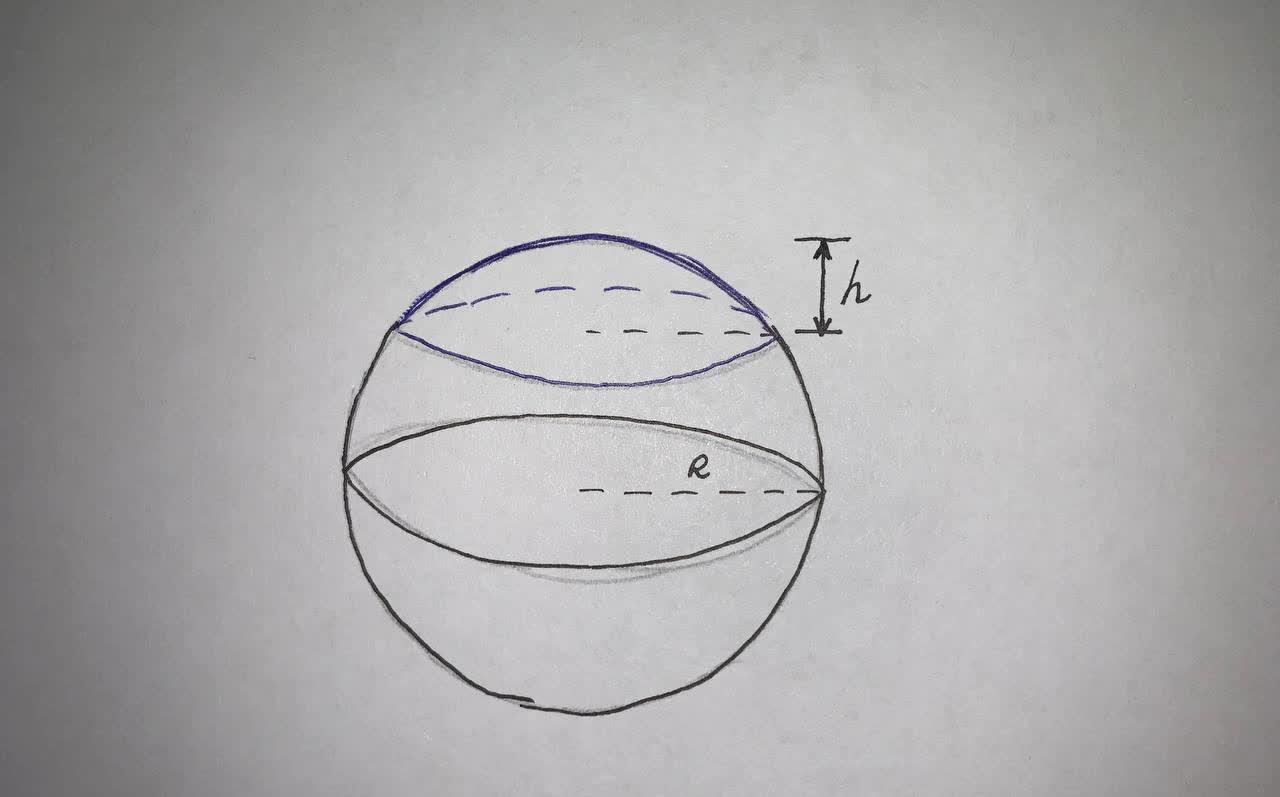
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.