Given the following constraints <mtable columnalign="right left" rowspacing="3pt" columnspacing=
uplakanimkk
Answered question
2022-07-15
I want to find all basic feasible solutions. They are the extreme points of the convex polyhedra induced by these constraints. However, to solve these system we introduce as many slack variables as we have inequalities. This leads us to
Now, a basic feasible solution would be
However,
1. How do I find all basic feasible solutions from this starting basic feasible solution?
2. These basic feasible solutions are basic feasible solutions for the modified system. How do I get basic feasible solutions for the original problem?
Answer & Explanation
Johnathan Morse
Beginner2022-07-16Added 18 answers
2. The solution you show is a basic feasible solution for the original problem, with all variables equal to zero. To get a feasible solution for your original problem, with nonzero problem variables: Do the Simplex phase II for some times. In the first step you take in a problem variable as a basic variable. Then after another the other variables. Probably your optimal solution has some zero problem variables.
Why do you want to have all basic feasible solutions?
rjawbreakerca
Beginner2022-07-17Added 5 answers
The problem of findig all basic feasible solutions of a polyhedron is called Vertex Enumeration Problem. In order to find all vertices, you may first obtain an arbitrary one, call it your root solution, and then build a solution tree by searching for its neighbors, its neighbors' neighbors, and so on. Each time you obtain a neighboring solution, you will have to check whether it is one that you already obtained; in which case you abandon the corresponding branch.
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??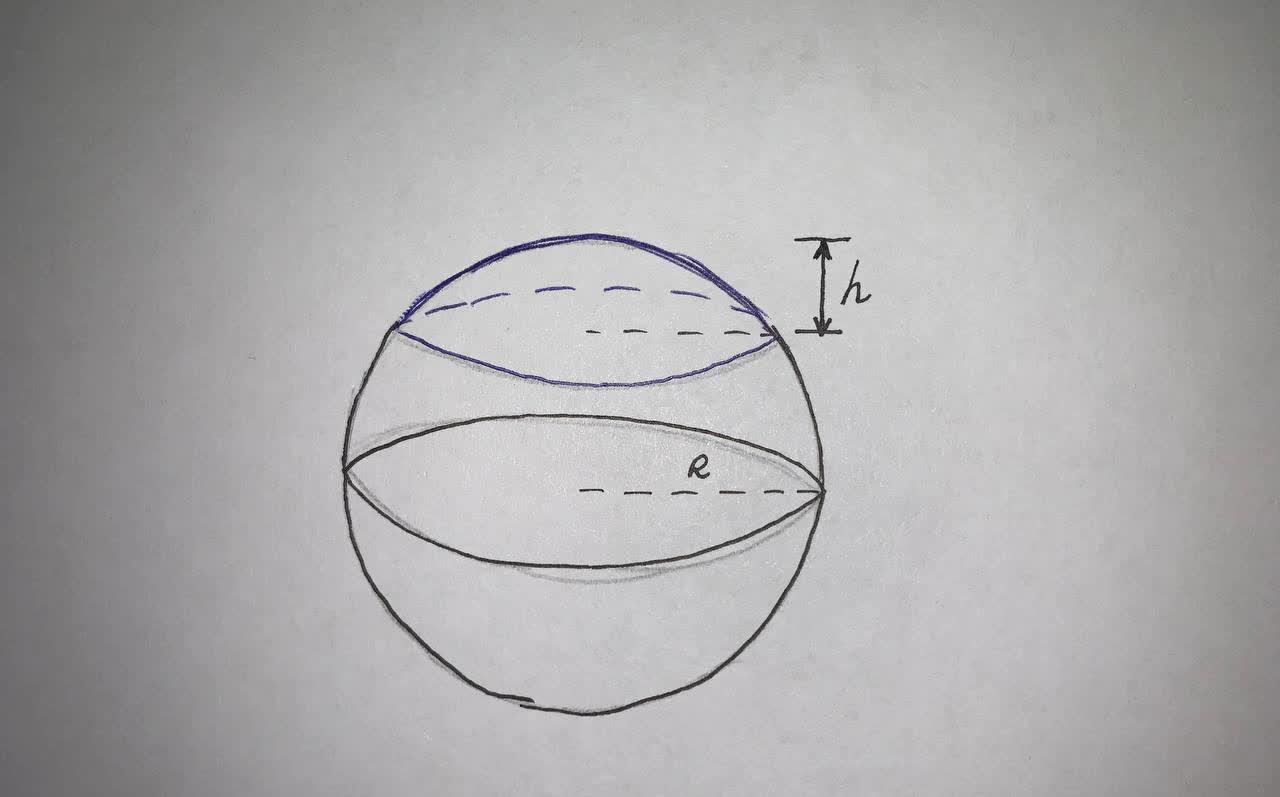
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.