Convex polyhedron P is a subset of <mi mathvariant="double-struck">R n </msup>
Cristopher Knox
Answered question
2022-07-15
where . It can be alternatively represented by two finite sets of generators :
where conv(V) denotes all convex combinations of points in V and cone(W) all nonnegative linear combinations of points in W.
Now, what if we allow to be from . Is there some similar representation in terms of generating points for such sets?
Answer & Explanation
Sophia Mcdowell
Beginner2022-07-16Added 14 answers
vortoca
Beginner2022-07-17Added 2 answers
Alternatively, they can be characterized directly by three sets of generators i.e. every point can be obtained as
where and and and there is such that . The trick here is that points in don't have to lie within the NNC polyhedron, but its closure, and whenever they appear in the sum, there must also be point from with nonzero coefficient. This representation can easily be converted to the one mentioned above.
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??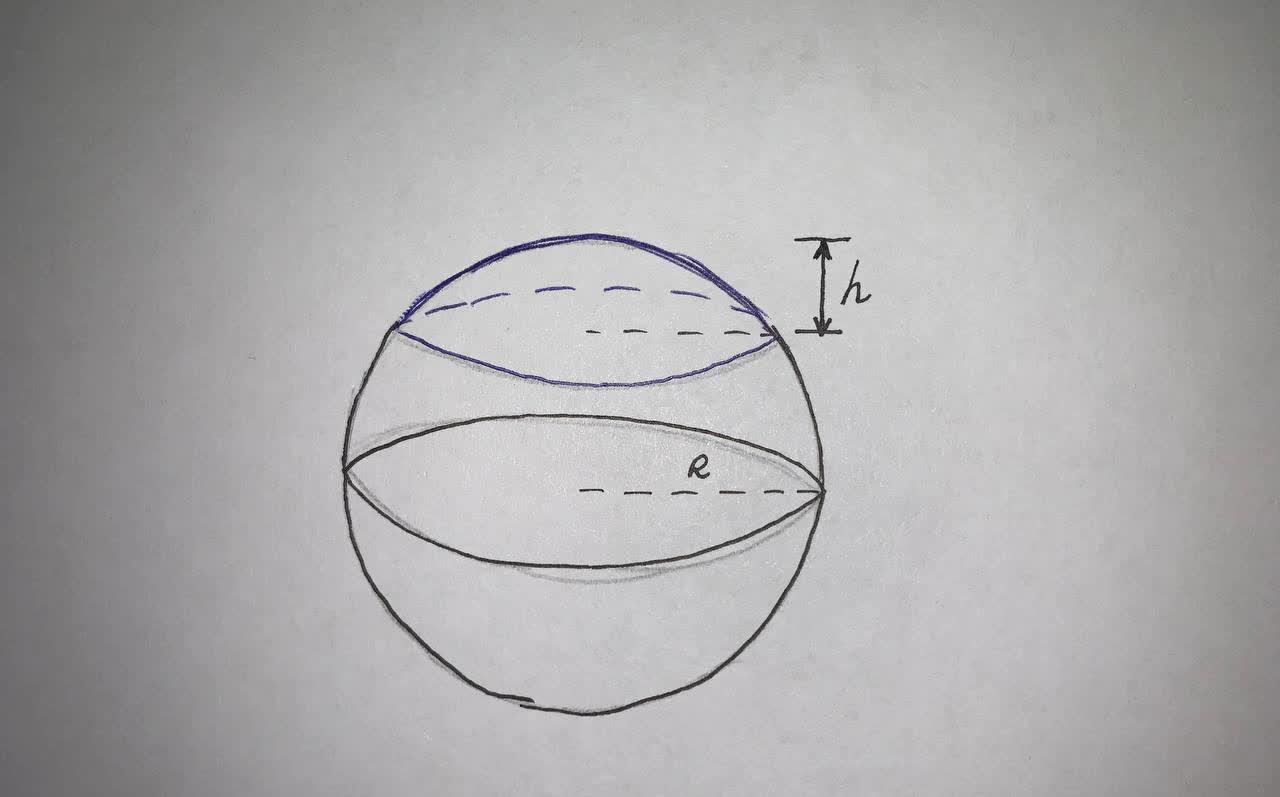
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.