x i </msub> + y i </msub> cos ⁡<!-- --> (
pouzdrotf
Answered question
2022-06-30
All and are parameters, I need to solve for , , , for all .
Answer & Explanation
Ronald Hickman
Beginner2022-07-01Added 18 answers
where is the by vector of variables.
Solve (using an optimizer which can handle the nonlinear inequalities) the following nonlinearly-constrained optimization problem: (but see the generalization below).
minimize with respect to x,M subject to
If the optimal objective of this problem is zero, then you have found a feasible solution to the original system of nonlinear inequalities. If it is positive, then the original system of nonlinear inequalities is infeasible (does not have an exact solution), but you will have found a solution which is close as possible to feasible, as measured per the objective function of the optimization problem.
You can use a different objective function in order to prioritize different levels of errors and relative importance of compliance among the various constraints. For instance, more generally consider an objective function such as
where , which allows a nonlinear "non-compliance" penalty and allows different weights for the different inequalities. The simple version presented above corresponds to all and . If you want to get really fancy, need not be the same for all inequalities.
bandikizaui
Beginner2022-07-02Added 7 answers
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??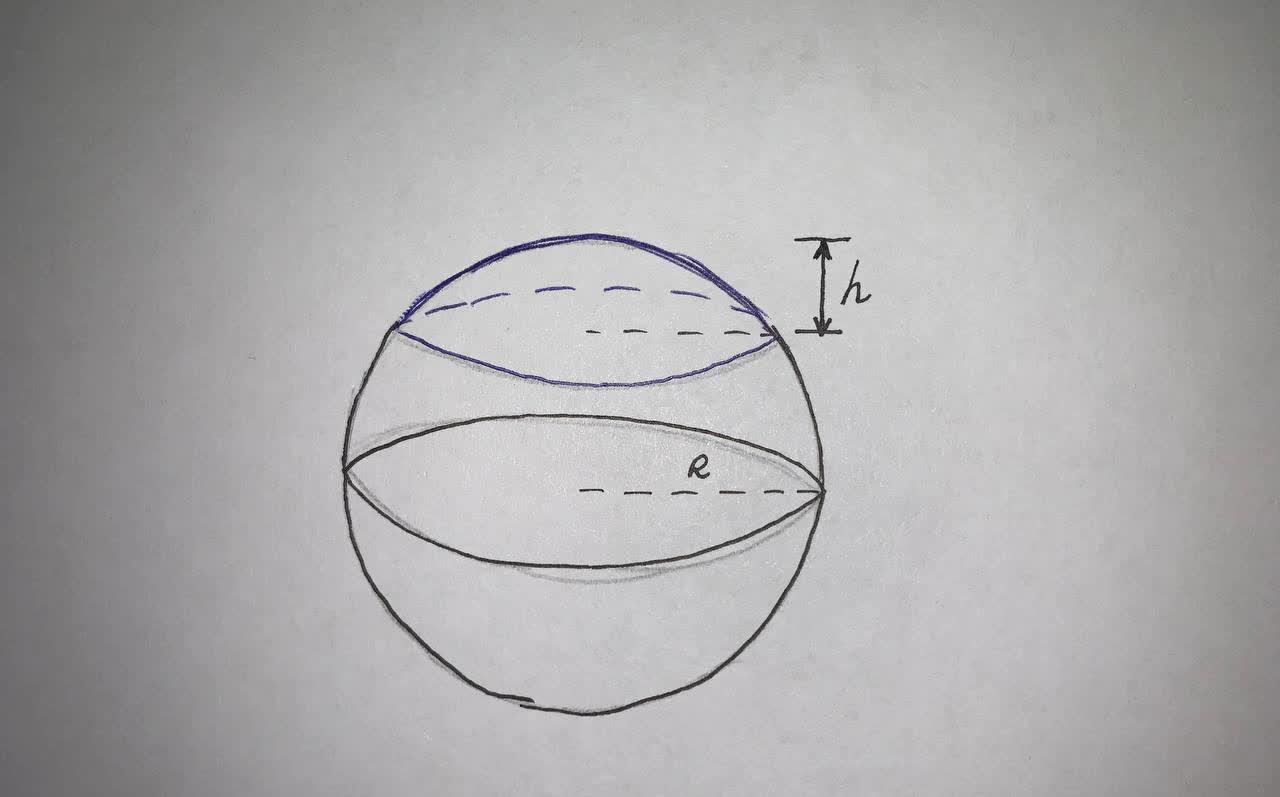
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.