When is | | A x | | 2 </msub> ≤<!-- ≤ --> | |
Araceli Clay
Answered question
2022-07-02
Answer & Explanation
amanhantmk
Beginner2022-07-03Added 17 answers
Thus the norm of a linear map is the maximal "stretch" in any direction, measured in terms of the underlying norm of . Since all linear maps of a finite dimensional space are continuous, the maximum is always attained. Moreover, it is always attained on the boundary of the unit ball of , namely at some for which . Invoking convexity arguments, it can be shown that the maximum is always attained at some extreme point of the unit ball of . These are points in the unit ball of that cannot be expressed as a convex combination of other points in the unit ball. This simple fact provides relatively simple formulas in case the underlying norm's unit ball does indeed possess a finite number of extreme points. For example, if the underlying unit ball is a polytope, then the norm of a linear map is the maximum of ∥ taken over the extreme points only, and since this a finite set, it is perhaps easier to compute the norm. For example, if , then the extreme points of the unit ball of are just , where are the standard unit vectors in , and so the norm of a linear map is given by
and if we think of as being represented by an matrix relative to the basis , then is the i'th column of the matrix, so we just need to pick the column whose norm is maximal. As another example, if , then the extreme points of the unit ball are the sign-vectors, namely , and so the norm of a linear map is the maximum of over all sign vectors.The situation for the Euclidean norm gets a bit more complicated, because every point of the unit ball's boundary of the Euclidean norm is an extreme point, so that in principle we have no preferred points on which we can compute the norm. I am not aware of a simple formula that connects the norm of a linear map to the entries of the matrix. (Here when I say "norm" I mean the norm defined by the general formula above, namely, the maximum of over varying in the underlying unit ball. Of course there are many other norms, for example, the Frobenius norm, for which there is a simple formula in terms of the matrix entries.)Even though there is no simple formula for the norm in terms of the matrix entries, the norm is intimately related to the eigenvalues of the matrix, provided these exist. This comes as no surprise, because eigenvalues measure the stretching in various directions. Thus, if is a symmetric matrix, then we know that there exists an orthonormal basis of eigenvectors of , hence there exists an orthonormal matrix such that is a diagonal matrix, and the diagonal consists of the eigenvalues of . Then we can compute
here we used the fact that preserves lengths as well as the fact that the set of all with coincides with the Euclidean unit ball. Now the action of the diagonal matrix on any is simply multiplying its coordinates by the diagonal entries, so we deduce that the norm of equals
where the maximum is taken over all such that . It is a simple exercise to prove that this is equal to . In other words,
The norm of a symmetric matrix is equal to the maximal absolute value of its eigenvalues.
In general however, there is no simple formula.
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??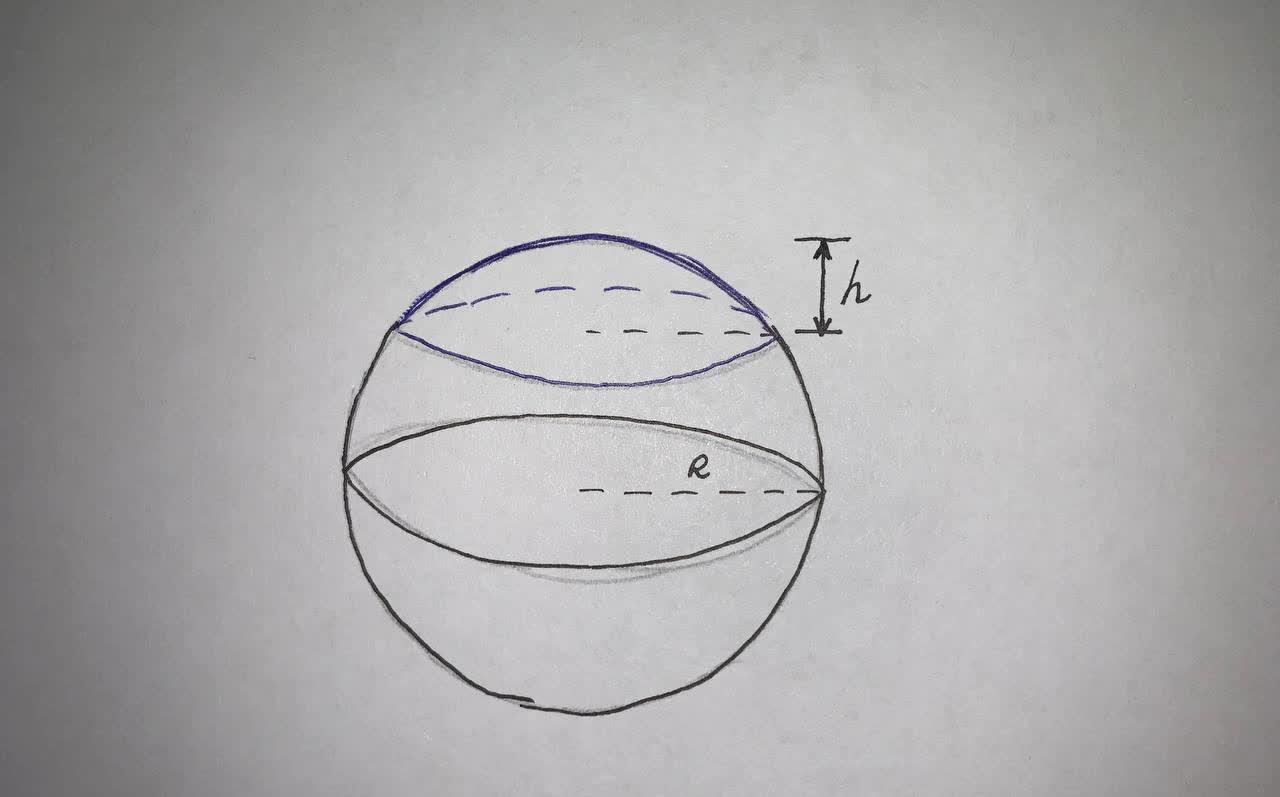
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.