I know from linear algebra that for a non-homogeneous consistent linear system that has an infinite
enthral4kvri
Answered question
2022-06-01
I was wondering if there is a similar parallel with differential equations, namely say I have a differential equation of the form
some cubic, and I want to find a particular solution of this. Then I make an that my is some cubic as well, of the form
When comparing coeffcients on the left and right hand sides, I have come across cases where by the coeffcients , ... on the L.H.S. do not have particular values, but are instead expressed as expressions involving one of the other coefficients as a free variable.
Is it possible that differential equations too may have an infinite number of particular solutions?
Answer & Explanation
Selena Pratt
Beginner2022-06-02Added 5 answers
Consider the collection of all infinitely differentiable functions. There is a function from this set to itself that maps a function to
This map is linear: D(f+g)=D(f)+D(g), and for all infinitely differentiable functions f and g, and all real numbers .
In particular, fix a function , and suppose that (that is, f is a particular solution to ). Then:
1. If g(x) is any solution to D(g)=0, that is, , then f(x)+g(x) is also a solution to . This because .
2. If h is any other solution to , then there exists a solution g to D(g)=0 such that h(x)=f(x)+g(x). That is, all solutions to are obtained by taking a single particular solution and addding solutions to D(y)=0.
To see this, notice that if , then . So h−f is a solution to D(y)=0. And h=f+(h−f), so h can be obtained by adding a solution to D(y)=0 to f.
In particular, the differential equation
that has at least one particular solution has exactly as many particular solutions as there are solutions to
So if the homogeneous equation has infinitely many (essentially distinct) solutions, and your original equation has at least one particular solution, then the original equation will in fact have infinitely many (essentially distinct) solutions as well.
This is in complete analogy to the case of a system of linear equations, which can be seen as given by the matrix equation , where is the matrix of coefficients of the system: given any particular solution , you get all solutions by taking , where is any solution to .
This is all part of linear algebra. Both systems of linear equations and linear differential equations can be studied together, and many general results apply to both, so it's no surprise you are seeing a lot of similarities: in fact, there are a lot of similarities.
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??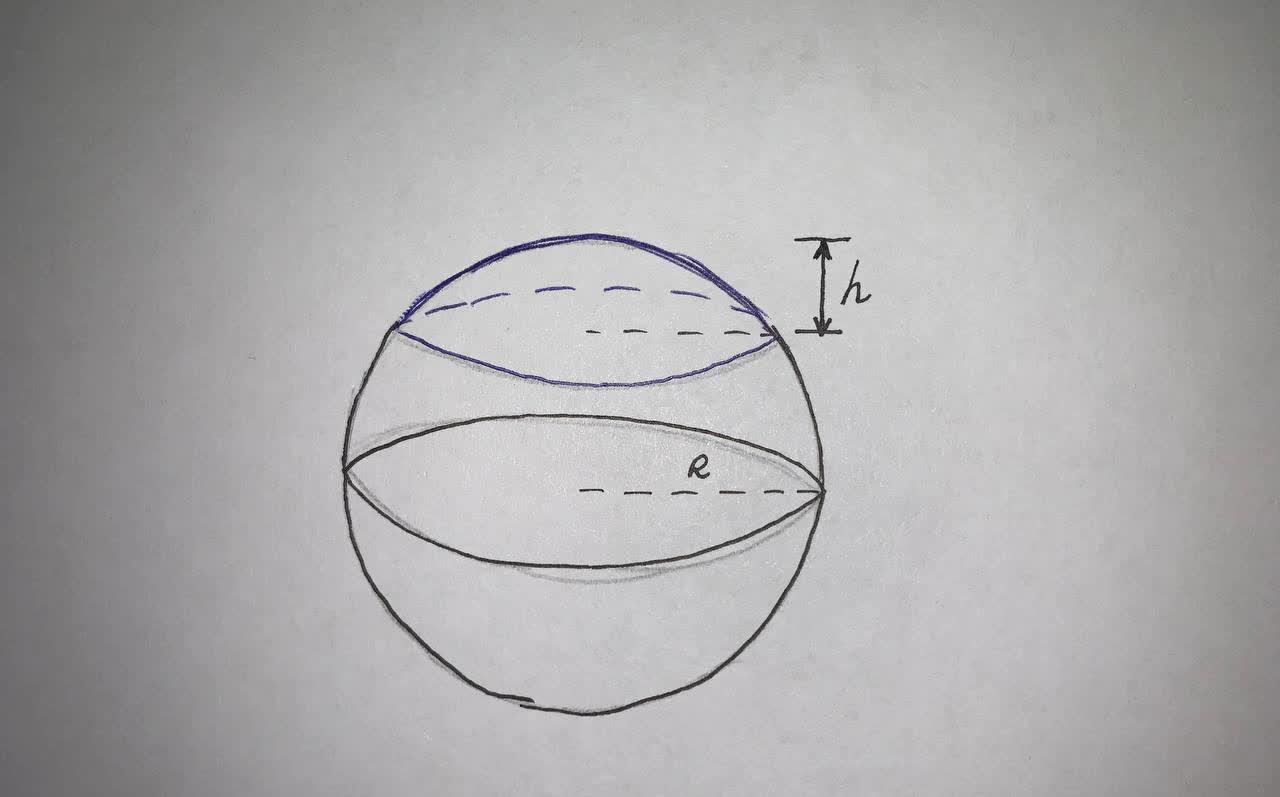
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.