Suppose that x , y , z , ν<!-- ν --> , N , g are some postitiv
Isaiah Owens
Answered question
2022-05-21
Answer & Explanation
Erzrivalef6
Beginner2022-05-22Added 10 answers
The feasible region is convex, an intersection of six open half-spaces, each delineated by a plane passing through the origin. It is possible for this intersection to be empty, unlike the relaxed "weak inequalites" system where the origin (0,0,0) will always be a solution.
Note that if (A,B,C) is a feasible point, then so too is any positive scalar multiple r>0 of it, (rA,rB,rC). So geometrically, if the feasible region is not empty, it consists of a collection of open rays proceeding from the origin.
If the coefficients were known, we could represent the feasible region by taking its intersection with the plane:
That intersection (if not empty) is an open polygon (the polygon excluding its perimeter). Such a polygon would be convex and have at most six sides, and its vertices can be readily computed by many linear programming packages. The feasible region of your problem is then all the open rays proceeding from the origin through a point in that open polygon. The points in the open polygon can be parameterized by barycentric coordinates.
Denisse Valdez
Beginner2022-05-23Added 5 answers
we get
or assuming
The matrix associated to the linear system is
and as long as we have as independent variations.
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??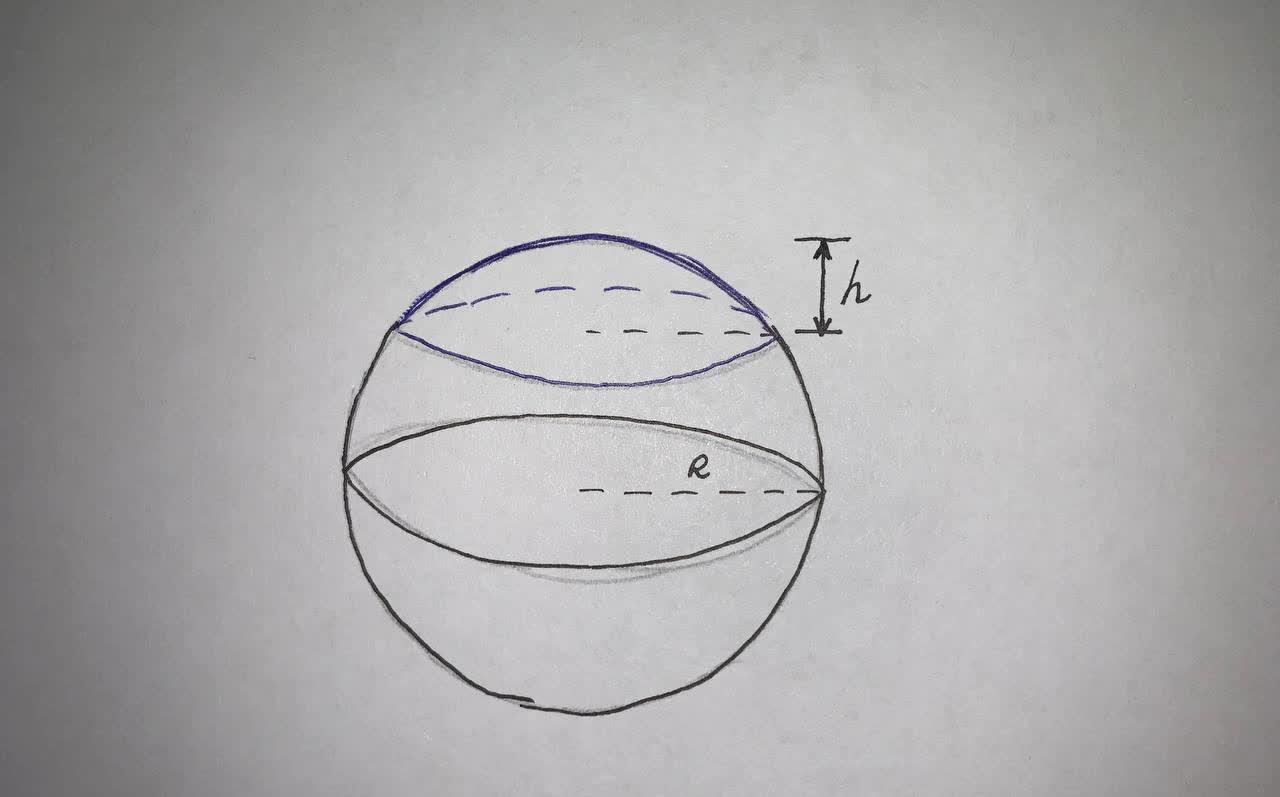
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.