Recently came across to solve system of linear differential equation with the matrix method, I have
Aryan Emery
Answered question
2022-02-25
A matrix method such as :
which then we replace a vector x =(x,y) and a matrix M with entries (57,94)
Is there any reason for this (such as the one in ordinary Differential equation is due to the fact that the exponential is the eigenfunction if the differential which also exist as a matrix method, but why the eigenvectors in the front of it?)
Answer & Explanation
e4mot1ic5bf
Beginner2022-02-26Added 6 answers
Hence, the system becomes,
By the linear independence of
for each i. In other words, we have now decoupled the system into n totally independent first order ODEs, in terms of the coordinates of y. These have the usual solutions:
for some constant
Katey Guzman
Beginner2022-02-27Added 4 answers
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??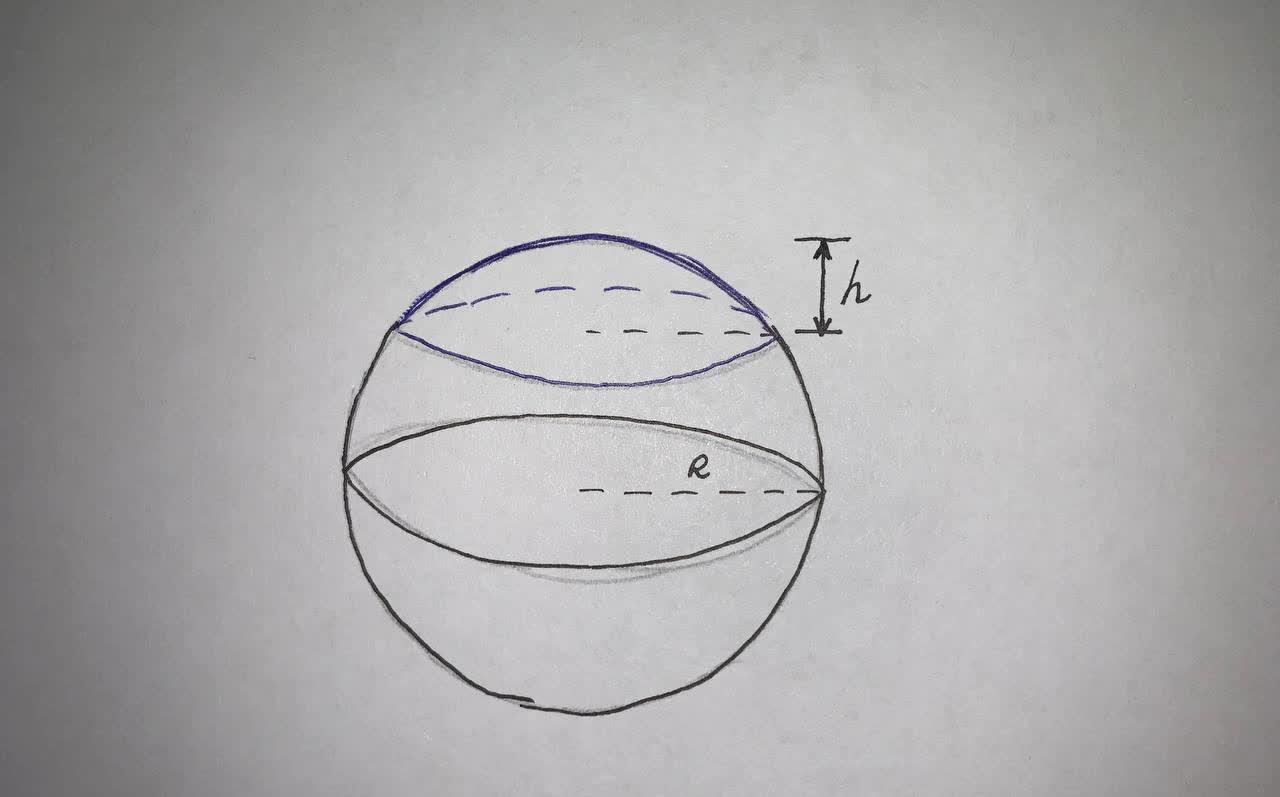
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.